(aktualizacja schematu)
Wykrywacz metaliKwazar-RAMIĘ, jedno z najpopularniejszych obecnie urządzeń cyfrowych.
Ten jest bardzo dobry i możesz to sprawdzić wpisując odpowiednią nazwę w wyszukiwarce internetowej lub na YouTube...
A jednak, oczywiście, urządzenie ma słabe punkty, które zmodernizujemy.
Zacznijmy od schematu urządzenia.

Zacznijmy od modernizacji generatora urządzenia, a właściwie obwodu sterującego Tx.

Sygnał z mikrokontrolera poprzez rezystancję R17 1 kOhm trafia do układu dopasowującego poziom wykonanego na tranzystorach BC846, następnie sygnał trafia do obwodu podobnego do „sterownika” Mosfetta (sterującego otwieraniem i zamykaniem tranzystorów polowych w IRF7105 montaż)…
Wszystko wydaje się być w porządku, wszystko działa, widzimy zadowolonych użytkowników. Problem jednak w tym, że rynek części nie zawsze oferuje nam dobre i tanie elementy. Często są to zawodne Chiny, a co najważniejsze, jeśli kupisz tanie urządzenie (tańsze od konkurencji), oznacza to tanie komponenty.
Z mojego doświadczenia wynika, że to urządzenie zawiodło już 3 razy. Konieczna była wymiana tranzystora BC846, doszło też do wymiany samego IRF7105.
W tym urządzeniu pracuje kilkanaście elementów, co oznacza, że możliwość awarii choćby jednego z 10 elementów obarczona jest awarią całego urządzenia.
Co robić?
Istnieje kilka opcji. Jednym z nich jest przepuszczenie sygnału z R17 przez element mikroukładu 74NS14. Tak działają kaskady urządzeń takich jak Groza czy Anker i inne. Działają już wiele lat i nie ma żadnych zastrzeżeń.
Ale na ile jest to uzasadnione? A jeśli to nie do końca właściwy krok?!
No cóż... przeglądając informacje w Internecie, znalazłem z pomocą dobrych znajomych specjalizowany mikroukład - TC4420 (być może podobny do niego).
Ten mikrochip w pakiecie SOIC-8 zawiera już zarówno sterownik, jak i zespół terenowy dla obciążenia do 1,5 A!
Rezultatem jest 1 mikroelement zamiast 10 części. Wszystko genialne jest proste!

Schemat zmodyfikowanej kaskady.
Nie możesz oczywiście na tym poprzestać i bezboleśnie wyrzucić C4, VD2, VD3, a także zastąpić rezystor R2 (10 omów) dopuszczalnym prądem w cewce Tx (do 1-2 omów). Wtedy prąd w cewce wzrośnie...
Jednakże eksperymenty z R2 wykazały, że czułość urządzenia przy zmianie prądu cewki Tx z 50 mA na 80 mA wzrasta jedynie o 3-5 cm na 5 kopiejek ZSRR. Ale żarłoczność urządzenia rośnie, co oznacza, że baterie będą się szybciej rozładowywać…

Jest tu o czym myśleć. Zacznijmy od tego, że czuła część wzmacniacza odbiorczego U1A jest wrażliwa na wszystko na obu wejściach (nogi 2 i 3). Zatem jakość sygnału (napięcie odniesienia) musi być idealna.
Ale jak zawsze, nie wszystko jest tak idealne, jak byśmy chcieli. Często obecnie na rynku elementów radiowych mikroukład MCP6022 jest produkowany w Chinach i ma wątpliwą jakość. Wykazuje następujące „objawy” - szum na wyjściu U1B aż do nasycenia (+3,3 V). Co więcej, urządzenie działa idealnie, jeśli działa nie dłużej niż 30 minut do 1,5 godziny. A uszkodzenia powstają podczas długotrwałej pracy.
Wszystko układa się na swoim miejscu, jeśli rozgrzejesz mikroukład (na przykład za pomocą lutownicy 8-nożnej MCP6022 (+3,3 V). Ale to tylko tymczasowe zbawienie, ponieważ
Rozwiązaniem problemu jest wymiana chińskiego mikroukładu MCP6022 na AD8606 (amerykańskiej firmy Analog Devices), lub prawdziwy MCP6022 firmy Microchip.
Drugim problemem tego urządzenia są kondensatory SMD o pojemności 10 µF. Które często są tak złe, że nie są w stanie utrzymać nawet tego napięcia (1,65 V) i z czasem lub natychmiast wylatują, po prostu zamieniając się w rezystor.
Rozwiązaniem jest wymiana go na kondensatory polarne tantalowe SMD o wymaganej wielkości.

Zmiany w „właściwym” czujniku urządzenia dopiero trwają… Reszta została już przetestowana i działa.
I na koniec… drobne zmiany w obwodzie, które można zignorować.
Można usunąć z płytek niepotrzebne węzły do programowania, pozostawiając tylko jeden (ja używam SWD), a także obwód do regulacji kontrastu na ekranie LCD - jeśli używasz ekranów OLED.


Zdjęcia - przed i po zmianach.
Życzę powodzenia wszystkim w tworzeniu i szukaniu instrumentów. Pozwól swojemu Quaza-ARM przyniesie Ci fajne znaleziska i nastrój!

Aleksander Serbin (Charków)
Dalszym rozwinięciem wykrywacza metali Quasar był podobny układ zbudowany na mikrokontrolerze z rodziny STM32. Urządzenie otrzymało nazwę Ramię Kwazaru.

Pod względem właściwości nowe urządzenie jest zbliżone do wersji na AVR. Główne różnice:
- Czułość została nieznacznie zwiększona.
- Maksymalna częstotliwość robocza ~ 21 kHz.
- Ulepszony dźwięk.
- W pewnych granicach możliwa jest elektroniczna kompensacja niewyważenia czujnika.
Format płytki drukowanej Układ sprintu 6: QuasarARM_PCB.zip
- Na prośbę pracowników usunięto tzw. opóźnienie dźwięku.
- Ulepszona separacja celów.
- „Długi” głos został skrócony.
- Wprowadzono trzy poziomy wygładzania (punkt menu „Wygładzanie”).
- Przycisk „W lewo” służy do przełączania pomiędzy trybami Maskowanie/Wszystkie metale. Włączenie podświetlenia zostaje odpowiednio usunięte z menu.
- Poprawki.
Wersja oprogramowania 2.5.2
- Przepisano znaczną część algorytmu przetwarzania.
- Wyrzucono bzdury.
- Usunięto automatyczną regulację podłoża.
- Wprowadzono parametr „Czas trwania” głosu.
Wersja oprogramowania 2.4.0
- Algorytm przetwarzania został zmieniony.
- Usunięto alternatywny tryb VDI.
- Poprawki.
- Wykryto globalny błąd przetwarzania - część danych nie została przetworzona. Przepisany.
Wersja oprogramowania 2.3.1
- Naprawiono kalibrację dla ferrytu i gleby
- Poprawione działanie menu (woltomierz)
Wersja oprogramowania 2.3.0
- Uproszczony rysunek poziomu odpowiedzi (usunięty suwak)
- Dodano symbol stopnia
- Dodano kamienną maskę (maska końcowa łuski)
- Automatyczna regulacja gleby jest zawarta w oddzielnym zadaniu z oceną niezawodności
- Wprowadzono błąd - automatyczna regulacja gleby wpływa na kalibrację ferrytu i kalibrację gleby
- Menu zostało dostosowane.
- Usunięto artefakty renderowania.
- Pinpointer przepisany.
- W oknie dialogowym wyważania gruntu pojawił się parametr M (wielkość), za pomocą którego można oszacować „ciężkość” gruntu.
- Algorytm używany do kalibracji ferrytu 0 i kalibracji gruntu został zastąpiony dokładniejszym.
- Drobne poprawki.
- Udoskonalenie algorytmu.
- Poprawki.
- Gra głosowa została nieznacznie zmieniona.
- Drobne poprawki.
- Zło zostaje usunięte, dobro zostaje.
- Naprawiono dźwięk.
- Definicja VDI stała się bardziej wiarygodna (?).
- Ton progowy jest „odwrócony”.
- Błędy naprawione.
- Zmieniony pinpointer.
Wersja oprogramowania 2.2.6
- Dźwięk przepisany
Wersja oprogramowania 2.2.5
- Algorytm detekcji został przywrócony zgodnie z wersją 2.2.2
- Nieznacznie zmodyfikowane przetwarzanie.
- Drobne poprawki.
- W menu Opcje sprzętowe pojawił się nowy parametr Osiągać(Osiągać). Nie jest to regulacja operacyjna, a raczej analogia lutowania rezystorów we wzmacniaczu wejściowym.
- Zmiany w algorytmie przetwarzania mające na celu zwiększenie odporności na zakłócenia.
- Menu zostało nieznacznie zmienione.
- Naprawiono drobne błędy.
- Naprawiono błędy w sterowaniu nadajnikiem FM.
Wersja oprogramowania 2.2.0 .
- Obsługa nadajnika FM.
- Naprawiono błąd w podświetleniu ekranu.
- Drobne poprawki.
- Dodano PWM (PWM) na pinie PA3 kontroler (dla lubiących eksperymentować. Pozycja menu „PWM użytkownika” .
- Drobne poprawki.
- Pinpointer został dostosowany.
- Drobne poprawki.
- Opóźnienie wyświetlania (opóźnienie) sygnatury zostało regulowane (pozycja menu „Sygnograf opóźnienia” ).
- Dostosowano działanie przycisków.
- Drobne poprawki.
- Zwiększono opóźnienie wyświetlania sygnatury.
- Zwiększono różnicę częstotliwości w obszarze VDI = 0.
- Usunięto wpływ ustawienia „Wzmocnienie LF” na tonie progowym i dźwięku przesterowanym.
- Zmieniony pinpointer.
- Dodano wyświetlanie zużycia prądu stopnia wyjściowego na ekranie głównym.
- Drobne poprawki.
- Pinpointer został napisany od nowa (ustawienie progu zostało wykonane ręcznie, detekcja VDI jest stabilniejsza, zmieniono sterowanie głosowe).
- Poprawki kosmetyczne.
- Pinpointer został przepisany (opcja raczej eksperymentalna - z adaptacyjnym progiem i wskazaniem VDI).
- Wyeliminowano opóźnienie przycisków spowodowane podświetleniem.
- Dodano możliwość zmiany głośności części głosu o niskiej częstotliwości.
- Zmiany kosmetyczne.
- Dostosowano algorytm kompensacji niewyważenia.
- Drobne poprawki.
- Woltomierz ustawiony.
- Drobne poprawki.
- Pinpointer został dostosowany.
- Dźwięk progu został przepisany.
- Ulepszony dźwięk.
- Dostosowano pierwszy schemat lektora.
- Drobne poprawki.
- Dodano tryb wyświetlania VDI w dużych ilościach.
- Drobne poprawki.
- W trybie precyzyjnym, kluczowe przypisania Lewy I Prawidłowy zamieniliśmy się miejscami.
- W związku z licznymi prośbami pracowników pojawił się tryb z wyświetlaczem VDI w formie cyfrowej.
- Czułość jest ustawiona na średnią wartość pomiędzy oprogramowaniem sprzętowym 2.0.4 I 2.0.6 .
- Czułość pinpointera (próg) jest regulowana oddzielnie, bezpośrednio w trybie pinpointera. Przypisanie klawiszy w tym trybie:
- W górę- zwiększenie progu i zresetowanie pinpointera
- W dół- zmniejszenie progu i zresetowanie pinpointera
- Prawidłowy- resetowanie pinpointera
- Pozostałe przyciski służą do wyjścia z trybu pinpointera
- Zwiększona czułość pinpointera.
- Maksymalna czułość została przywrócona do poziomu oprogramowania sprzętowego 2.0.2b.
- Naprawiono błędy w sterowaniu kompensatorem niewyważenia.
- Analogicznie do wersji 2.0.2 betta, z poprawionymi (niektórymi) błędami.
- Dostosowano okno dialogowe balansu gruntu.
- Kompensator został przepisany.
- Drobne poprawki.
- Dostosowano rysunek sygnatury.
- Przetwarzanie zostało dostosowane w celu poprawy odporności na zakłócenia.
- Dodano możliwość przełączania trybów przetwarzania w menu Przetwarzanie.
- Dźwięk naprawiony i ulepszony.
- Algorytm został dostosowany.
- Diagnostyka zakończona.
- Dźwięk dostosowany.
- Naprawiono wskazanie niskiego poziomu naładowania baterii.
- Poprawiono algorytm kompensacji niewyważenia czujnika.
- Granice pierwszych 3 („czarnych”) sektorów zostały zmienione.
- Drobne poprawki.
- Korekcja algorytmów i korekcja błędów.
- Dalsza korekta algorytmu.
- Pinpointer przepisany.
- Drobne poprawki.
- W menu „Opcje sprzętowe” podmenu gotowe „Balans cewki…” i są w nim 3 punkty:
"Balansować"- aktualny stan rzeczy i odszkodowania
„Pożądana równowaga”- jaki balans chciałbyś uzyskać?
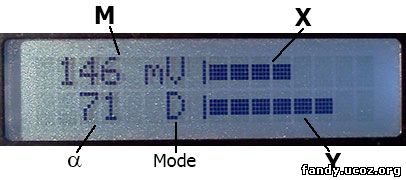
„Brak kompensatora”- wyważenie czujnika przy wyłączonym kompensatorzeEkrany wszystkich 3 punktów są identyczne i różnią się literą w drugiej linii - "B" - "Balansować" "D" - „Pożądana równowaga” "N" - "Brak kompensatora." Ponadto przy wyborze odszkodowania należy zwrócić uwagę na literę "A" , a po zakończeniu wyboru na krótko zostanie wyświetlony wykrzyknik.
Na ekranie wyświetlane są graficznie rzuty wektora niewyważenia X (górna linia) i Y (dolna linia), a także zakres niewyważenia w miliwoltach (górna linia) oraz kąt wektora niewyważenia w stopniach (dolna linia) w formie numerycznej . „Brak kompensatora” służy do konfiguracji samego czujnika w procesie produkcyjnym.
„Pożądana równowaga”- ustawiona jest żądana nierównowaga. Zmień wartość X za pomocą przycisków „W prawo”/„W lewo” i zmień wartość Y za pomocą przycisków „W górę”/„W dół”. Przycisk „OK” – wyjście z zapisem, „Esc” – bez zapisu.
W menu "Balansować" Wyświetlany jest aktualny stan rzeczy łącznie z odszkodowaniami. Naciśnięcie dowolnego przycisku „Lewo/Prawo/Góra/Dół” rozpoczyna proces doboru kompensacji tak, aby wynik był jak najbardziej zbliżony do pożądanego (ustawianego w menu „Żądany balans”). „OK” – wyjdź z zapisaniem wyniku, „Esc” – wyjdź bez zapisywania.

- Dodano 3 profile do zapisywania/przywracania bieżących ustawień (A, B i C). Początkowo profile są puste, tzn. zawierają wartości domyślne. Sposób użycia: „Zapisz” – zapisz aktualne ustawienia do profilu, „Załaduj” – załaduj ustawienia z profilu.
- Korekta algorytmu.
- Przywrócono regulację jasności podświetlenia.
- Dostosowano odczyty woltomierza. W której R21 możesz zostawić 3,3 ... 3,9 kOhm i R20 należy zastąpić 15 ... 20 kOhm. Prawidłowe odczyty ustawia się w menu w sekcji „Opcje sprzętowe... -> Woltomierz”.
- Drobne poprawki.
- Naprawiono problemy z pracą na wysokich częstotliwościach.
- Z menu usunięto regulację głośności, a przycisk „W lewo” służy do włączania/wyłączania podświetlenia.
- Dostosowano maksymalną częstotliwość głosu.
- Drobne poprawki i ulepszenia.
- Dodano ciągłą automatyczną regulację podłoża. Konfiguruje się go z menu (Prędkość GEB), posiada 4 stopnie - wyłączone („wyłączone”) i prędkość autotuningu od 1 do 3. 1 to najwolniejsze autotuningowanie, 3 to najszybsze. W trybach 1-3 aktualny kąt uziemienia wyświetlany jest w tym samym miejscu, w którym wyświetlane jest napięcie zasilania.
- Drobne poprawki.
DO Vazar ARM to selektywny wykrywacz metali z ekranem LCD i podziałem metali na 16 grup. Jest to kontynuacja projektu wykrywacza metali Quasar. Nowy obwód wykorzystuje mocniejszy mikrokontroler ARM32 i dodaje dodatkowe funkcje.
Charakterystyka techniczna wykrywacza metali Quasar ARM:
· Częstotliwość pracy – od 4 do 16 kHz;
· Wskazanie – wielotonowy dźwiękowy i wizualny ekran LCD.
· Zasilanie – 12 V.
· Głębokość wykrywania monety ZSRR o nominale 5 kopiejek (z cewką DD 23 cm) wynosi 30 cm.
Ten wykrywacz metali ma średni poziom trudności , do samodzielnego odtwarzania! Jego produkcją powinny zajmować się wyłącznie osoby posiadające doświadczenie. Są elementy SMD (które mogą sprawić trudności początkującemu), programowalny mikrokontroler i cewka do wykrywacza metalu IB, co również przysporzy sporo kłopotów, jeśli nie ma się odpowiedniego doświadczenia. Ale jeśli wszystkie te niuanse Ci nie przeszkadzają, urządzenie przyjemnie Cię zadowoli. Dużym plusem przy jego tworzeniu jest także duża ilość dyskusji w Internecie, gdzie zostało już poruszonych wiele kwestii!
Ulepszenia w nowym Quasar AWS:
· Usunięto zewnętrzny ADC, który był trudny do zakupu.
· Zwiększona wrażliwość.
· Zakres częstotliwości od 4 do 16 kHz.
· Lepsza jakość dźwięku.
· Dodano trzy profile do zapisywania i przywracania ustawień (A, B, C).
· Wprowadzono kompensację elektroniczną w celu wyeliminowania niewyważenia cewek.
Schemat wykrywacza metalu Quasar ARM
 Pobierać schemat i lista części do wykrywacza metali Kvazar ARM -
Pobierać schemat i lista części do wykrywacza metali Kvazar ARM -
Płytka drukowana wykrywacza metali Quasar AWP
 Archiwum ze stacją roboczą Quasar z płytką drukowaną -
Archiwum ze stacją roboczą Quasar z płytką drukowaną -
Płytka z ekranem do wykrywacza metali Quasar AWP
 Do wykrywacza metali Quasar AWP można zastosować ekrany RC1602A z kontrolerem HD44780 lub KS0066.
Do wykrywacza metali Quasar AWP można zastosować ekrany RC1602A z kontrolerem HD44780 lub KS0066.
Po wykonaniu płytki pod wykrywacz metali Quasar AWP należy wykonać flashowanie mikrokontrolera. Do zaprogramowania mikrokontrolera można użyć programatora st link v2 (jest on dostępny w sklepach internetowych), natomiast dla osób posiadających port COM (w dzisiejszych czasach duży luksus) można zastosować na swoim komputerze prosty programator według tego diagram (Schemat pochodzi stąd - http://forum.cxem.net/index.php?showtopic=144107&st=20):
Oprogramowanie sprzętowe wykrywacza metali Quazar ARM 2.1.2 (najnowsze w momencie pisania tego tekstu) –
Archiwum z oprogramowaniem do wykrywacza metali Quasar ARM i opisem ich zmian -
Po flashowaniu wykrywacza metalu należy przeprowadzić przebiegi testowe i rozpocząć produkcję cewki wyszukiwania.
Instrukcja obsługi wykrywacza metali Quasar ARM -
Znalazłem następujący film opisujący proces produkcji bloku i cewki wykrywacza metalu Kvaraz AVR:
Część 1, zaczynając od planszy
Część 5, przejdźmy do wykonania cewki do wykrywacza metalu Quasar
Część 12, zakończenie i dopracowanie
Wniosek: Quasar ARM to przyzwoity wykrywacz metali średniej klasy. Jeśli zostanie wyprodukowany prawidłowo, może konkurować z markowymi analogami. Głównym zadaniem wykrywacza metalu jest wyszukiwanie monet. Obwód nie zawiera drogich i rzadkich komponentów, ale ma wiele niuansów technologicznych i wymaga jakości produkcji cewek. Aby to powtórzyć, zaleca się „mieć” doświadczenie z podobnymi produktami, w przeciwnym razie wynik może Cię rozczarować!
Materiały użyte podczas pisania tego artykułu:
· Forum Scheme.net - http://forum.cxem.net/index.php?showtopic=144107&st=0
Wykrywacz metali to sposób na odnalezienie kluczy do samochodu zagubionych jesienią w ogrodzie lub włazach kanalizacyjnych pod liśćmi :)
Ten wykrywacz metali nazywa się Quasar (Quasar), został opracowany przez Andrieja Fiodorowa, ale nie bez pomocy członków forum md4u.ru, którzy udzielali porad i zgłaszali błędy podczas testowania nowych wersji oprogramowania.

Quasar to wykrywacz metali z obróbką bezpośrednią, działający na zasadzie równowagi indukcyjnej. Głównymi zaletami takich wykrywaczy metali jest możliwość odstrojenia się od podłoża, a także różnica między metalami pod względem ich rezystancji i właściwości ferromagnetycznych.

Ten wykrywacz metali potrafi określić, jaki metal leży pod ziemią, choć nie ze 100% prawdopodobieństwem, ale z łatwością potrafi odróżnić metale nieżelazne od żelaznych i w większości przypadków, który metal nieżelazny znajduje się pod jego cewką.
Potrafi powiadomić właściciela o metalowym podziemiu za pomocą dźwięków o różnej tonacji (częstotliwości) i wyświetlić informację na szesnastoznakowym dwuwierszowym wyświetlaczu w formie histogramu.Ma mnóstwo ustawień, ale przede wszystkim.
Uwaga, poniżej znajdziecie trochę więcej zdjęć.
W obecnej realizacji mamy:
- Automatyczne strojenie podłoża
- Automatyczne strojenie rezonansu i tryb ręczny
- Regulacja głośności
- Regulacja jasności wyświetlacza
- Tryb Pinpointera
- Ustawianie dolnej granicy napięcia zasilania dla automatycznego wyłączania
- Kalibracja ferrytu z możliwością regulacji
- Możliwość wyboru celów dźwięcznych (maska)
- Kilka schematów dźwiękowych dla aktorstwa głosowego
- Schemat 1: Częstotliwość zmienia się płynnie w całym zakresie w zależności od celu VDI
- Schemat 2: Częstotliwość zmienia się płynnie w zależności od VDI od 0 (90) do 41 (131) stopni. Cele poniżej 0 brzmią niskim tonem, powyżej 41 - wysokim tonem
- Schemat 3: Cele poniżej 0 (90) nagłaśniane są tonem niskim, powyżej 0 (90) tonem wysokim
- Trzy zgrubne poziomy wzmocnienia
- 30 płynnych poziomów wzmocnienia
- Filtr glebowy
- Zobacz saldo cewki w czasie rzeczywistym
Obwód nie jest skomplikowany, nie ma szczególnie rzadkich części. Możesz go pobrać
Zacznijmy od sztangi. Pozostaje przy prostszej realizacji wykrywacza metali „Volksturm sm+geb”. Wykonano go z rur PCV z adapterami pod kątem 45 stopni. Przed sklejeniem ten projekt wyglądał mniej więcej tak:

Po sklejeniu mamy działający kij:

Uchwyt kołowrotka wykonano za pomocą plastikowych połączeń śrubowych, stosowanych w tej samej armaturze wodno-kanalizacyjnej, który następnie mocuje się do kołowrotka za pomocą kleju epoksydowego i można go odłączyć od wędki:

Podłokietnik wykonaliśmy z fotobębna dużej kopiarki formatu A3 :) Czyli do pręta przyczepiamy małą szlifierkę, wiertarkę i okazuje się, że cała konstrukcja trzyma się całkiem nieźle.

Owijamy rączkę czymś miękkim, następnie zamykamy rurką termokurczliwą o dużej średnicy, podgrzewamy i otrzymujemy wygodną, ergonomiczną rączkę :)

Już prawie skończyliśmy mechanikę, pomalujemy ją później. Nie będziemy szczegółowo omawiać, jak powstała tablica, skupimy się jedynie na istotnych punktach. Obudowa Cradex Z5 o wymiarach 103*90*40 idealnie mieści się pod płytkę drukowaną opracowaną przez jednego z uczestników forum dotyczącą mikroukładów w pakietach DIP. Link do tablicy na końcu artykułu.

Kupujemy części, mierzymy, czy konstrukcja płytki jest odpowiednia i pobieramy kondensatory elektryczne z serii o niskim ESR.

Tekstolit wytrawiono w nadsiarczanie amonu. Trucizna szybko i pięknie. Wystarczy napełnić go ciepłą wodą, około 80 stopni.



Następnie wyświetlacz jest lutowany i włączany po raz pierwszy - test.

Jeżeli po włączeniu zasilania na ekranie widoczna jest jedna linia ciemnych prostokątów, oznacza to, że ekran pracuje i jest to jego tryb autotestu - gdy zasilanie jest podłączone, ale nie zostały jeszcze odebrane polecenia sterujące (nie nastąpiła inicjalizacja).

Niektórych elementów na płytce nie zobaczysz od strony części, bo... Nie mogłem ich znaleźć w formacie DIP. To regulowana dioda Zenera TL431, para kondensatorów filtrujących i niezbyt piękne przewody w okolicy wzmacniacza operacyjnego, bo Oryginalnego nie znaleźliśmy, wzięliśmy podobny, ale miał trochę inny układ pinów - trudno było :)


Zacznijmy pracę z ciałem. Trzeba w nim zrobić kilka otworów - na ekran, przyciski sterujące, złącze cewki i złącze zasilania. Obudowa musi być również izolowana przed wilgocią - w przeciwnym razie urządzenie może zacząć działać nieprawidłowo lub ulec awarii. Dla wygody wycięcia otworu na ekran wzięliśmy ekran o tej samej funkcjonalności, tylko z niebieskim filtrem, ponieważ nasz zielony był już przylutowany do płytki za pomocą stałego połączenia.

Stał idealnie, ale :) Kiedy próbowaliśmy go przymierzyć na nasz ekran, rozczarowanie nie miało granic :) Okazały się, że mają różne rozmiary. Musiałem to dokończyć.



W końcu wszystko się udało. Wypróbowałem, podłączyłem i działa :)

Górny przedni panel został zagłębiony w plastik tak, aby nie wystawał, bo Potem planowano wszystko okleić folią i naklejką. Sam ekran zabezpieczono dużą ilością kleju termotopliwego. Połączenie tego typu ma dwie zalety: do środka nie przedostaje się woda oraz nie ma połączeń śrubowych, które trzeba by jeszcze uszczelnić.



Nalewali go zwykłą opalarką, a tam, gdzie nie nagrzewał się dobrze, pomagali suszarką do włosów ze stacji lutowniczej. W tej chwili sam ekran może zmienić kolor na niebieskawy lub inny kolor z powodu ogrzewania, najważniejsze jest, aby nie przesadzić. Po ochłodzeniu kolor wraca do normy i wszystko działa normalnie.

Płytkę pod przyciski wykonaliśmy sami, bo... nie było gotowej odpowiedniej gotowej konstrukcji dla tego budynku. Na końcu artykułu będzie plik. Diody w nim są smd.

I tak wszystkie otwory są wykonane, płytka przycisków, głośnik, złącza zasilania i złącza cewek są również uszczelnione klejem termotopliwym.

Jeśli chodzi o projekt, długo zastanawialiśmy się, jaki kolor wybrać. Wybraliśmy opcję czarną.

Technologia jest prosta. Drukujemy zdjęcie i wycinamy otwór na ekran. Cięli skalpelem. Następnie przyklejamy folię pod ekran projektu, następnie bierzemy przezroczystą, matową, samoprzylepną folię i tak powstały placek przyklejamy do plastiku, odcinamy nadmiar folii i gotowe!



Blok mocowano do pręta za pomocą kawałka grubej pleksi, pociętego na paski i wygiętego pod wpływem miejscowego nagrzewania, przykręconego jedną stroną do puszki, drugą do „uchwytów do rur” czy jak to się tam nazywa. .

Notabene później usunięto dwa zewnętrzne zapięcia, czyli całość trzymała się idealnie nawet na dwóch zapięciach.
Tak więc po wykonaniu wszystkich tych operacji pomalowaliśmy pasek i oto co wyszło:


Osobno pozostaje porozmawiać o cewce. Można powiedzieć, że jest to najbardziej czuły element i trzeba go tak zmontować, aby przy szukaniu i dotykaniu wszelkiego rodzaju trawy i innych obiektów nie „mikrofonował” a reagował jedynie na zmianę fazy spowodowaną metalem pod czujnikiem . Od razu chcieliśmy zrobić cewkę tak jak należy, uzwoiliśmy cewki... Swoją drogą wszystkie przewody zostały pobrane ze starego monitora CRT. Jego pętla demagnetyzacyjna idealnie wpasowała się pod cewkę nadawczą TX, w innej cewce znaleziono cieńszy drut, przewód do wykrywacza metali został pobrany z jej nieodłączalnego kabla VGA, w sumie przewodów stamtąd było wystarczająco dużo :)



Po nawinięciu dwóch cewek, jedną z nich (odbiorczą, RX) należy nawinąć w ekran wykonany z folii lub grafitu. Jeśli jest to folia, należy upewnić się, że z tego ekranu nie ma zwarcia, jeśli jest to grafit, konieczne jest, aby rezystancja od środka do krawędzi cewki wynosiła około 1 kOhm.


Po dobraniu kondensatora rezonansowego (urządzenie oczywiście samo się reguluje, ale my dobraliśmy częstotliwość bliższą 9 kHz), przyszedł czas na wypełnienie tych cewek w formie żywicą epoksydową. A potem wybuchł spór z pudełkiem i Internetem. Na opakowaniu jest napisane, że należy rozcieńczyć w proporcji 1:5. Jeden na pięciu, do cholery! Biorąc pod uwagę, że mieliśmy już pewne doświadczenie w pracy z żywicami epoksydowymi, gdzie wszędzie była mowa o proporcji 10-12:100, powstało pewne nieporozumienie. Ale postanowili zrobić jak napisano, producent nie napisze śmieci na pudełku :) I nawet nie zdecydowali się przetestować tego z małą ilością tej żywicy. Chcę jak najszybciej iść na policję! Krótko mówiąc, zaczęli nalewać, potem zmienili zdanie, bo proporcje żywicy i utwardzacza były w sam raz na 10-12:100, a potem zapomnieli, ile tego już nalali... W sumie to zrujnowali rozwiązanie, ale próbowali je wypełnić :)


I nawet nie pomyślał o zamarznięciu. Co robić? Wyciągnęliśmy cewki z formy, oczyściliśmy je z całej żywicy i przyszedł nam do głowy kolejny pomysł. Przecież nasz monitor CRT to swego rodzaju róg obfitości do budowy wykrywacza metalu :) Stojak od niego też się przydał. Bierzemy, usuwamy wszystko, co niepotrzebne, mocujemy cewki, wypełniamy żywicą epoksydową w normalnych proporcjach, wiercimy otwory - gotowe!



Wszystko to pokazało swoją skuteczność już w pierwszej kopalni na rzece Soż:


Jeśli chodzi o zasilanie wykrywacza metalu - na chwilę obecną pochodzi ono ze zwykłego akumulatora ołowiowego 12 V, który nosi się ze sobą w teczce, jednak o tej metodzie nie słychać zbyt wiele szumu. W planach jest od razu zbudowanie zasilacza na jednym elemencie 18650 (około 2Ah przy 3,7 V), wykonanie wskazania poziomu naładowania, ładowanie z USB i przetwornicy 3,7-7, bo To właśnie z tego napięcia zasilany jest wykrywacz metali. Możliwe byłoby podniesienie napięcia do 5 woltów z pominięciem stabilizatora sterownika i przetwornika ADC, ale lepiej jest ustawić cewkę na wyższym napięciu, wtedy czułość będzie wyższa, ale o tym w innym artykule. Pobiera około 100 mA przy 7 V, więc z jednego akumulatora 18650 można liczyć na około 10 godzin pracy. A najważniejsze, że ta rzecz będzie znacznie lżejsza niż akumulator ołowiowy, co pozwoli na zamontowanie jej razem z blokiem na pręcie.
Obiecane płytki w formacie Lay do wykrywacza metali Quasar, jak w tym artykule.
Wszystkiego najlepszego!



„Kvazar” to wykrywacz metali IB z bezpośrednim przetwarzaniem, opracowany na bazie niedrogich elementów. Zaimplementowano tryb selektywny z wyświetlaniem VDI w postaci wykresu słupkowego (signografu) oraz możliwością maskowania każdego z 16 sektorów. Sygnalizacja dźwiękowa – wielotonowa. Tłumienie odpowiedzi uziemienia jest wektorowe.
Forum z dyskusją na temat urządzenia: http://md4u.ru/viewforum.php?f=95

Ogólny widok układu

Ekran urządzenia

Skala VDI w stopniach
Przeznaczenie przycisków:
- SW1„W górę / Bariera+ / Autodostrojenie”
- SW2„Enter / OK / Równowaga gruntu”
- SW3„Prawo (+) / PinPointer”
- SW4„Lewy (-) / Podświetlenie”
- SW5„Menu/Esc”
- SW6„W dół/Bariera/Autodostrajanie”
- Dodano menu "Przetwarzanie"(jak w wersji ARM).
- Drobne poprawki.
- Naprawiono krytyczny błąd w algorytmie automatycznej regulacji kąta reakcji podłoża.
Wersja oprogramowania 1.4.3
- Algorytm został dostosowany.
- Pinpointer został dostosowany.
Wersja oprogramowania 1.4.2
- Algorytm przetwarzania został dostosowany.
- Dostosowano rysunek sygnatury.
- Pinpointer przepisany.
- Zmieniono ekran równoważenia czujnika.
- Dostosowano działanie automatycznego balansu do gruntu.
- Drobne poprawki.
- Zwiększona szybkość reakcji celu.
- Drobne poprawki.
- Korekta algorytmu.
- Kolejna korekta algorytmu.
- Algorytm rozpoznawania celu został zmieniony.
- Dodano dźwięk progowy.
- Przetwarzanie zostało dostosowane.
- Drobne poprawki.
- Dźwięk został przepisany.
- Poprawiono selekcję.
- Drobne poprawki.
- Dodano minimalny poziom napięcia akumulatora.
- Dostosowano algorytmy pomocnicze.
- Ulepszenia kosmetyczne.
- Poprawione działanie pinpointera
- Wprowadzono drobne zmiany
- Dostosowano automatyczny wybór częstotliwości.
- Błędy naprawione.
- Opcja pośrednia.
- Zmieniono zasadę powstawania dźwięku. „Solidna” dyskryminacja stała się lepsza.
- Usunięto opcje „Opóźnienie dźwięku” i „Ignoruj impulsy”.
- Błędy naprawione.
- Dostosowano tłumienie echa.
- Zmniejszona częstotliwość dźwięku w trybie pinpointera.
- Dodano pinpointer. Głośność można teraz regulować za pomocą SW4(w kółku), a do trybu pinpointera wchodzi się poprzez naciśnięcie SW3. Z trybu pinpointera wychodzi się poprzez naciśnięcie dowolnego przycisku.
- Algorytm tłumienia reakcji gruntu został zmieniony.
- Drobne poprawki.
- Dostosowano głos służący do równoważenia gruntu.
- Algorytm wyszukiwania częstotliwości rezonansowej TX został zmieniony.
- Skrócony czas reakcji przycisków.
- Ulepszone renderowanie w skali VDI.
- Ogłoszono proces odstrajania od ziemi.
- Drobne poprawki.
- Opóźnienie dźwięku można teraz regulować.
Wersja oprogramowania 1.1.9 .
- Można wybrać tryb pracy wskaźnika poziomu reakcji – statyczny lub dynamiczny (punkt menu „Wskaźnik poziomu”).
- Dodano tłumik krótkich dźwięków (kliknięć). Domyślnie jest wyłączona, włączana z menu „Audio -> Ignoruj impuls”. Im wyższa liczba, tym silniejsze kliknięcia (i większa szansa na przeoczenie małego celu).
- Menu zostało nieco przebudowane.
Wersja oprogramowania 1.1.8 .
- Wskaźnik poziomu reakcji znów stał się dynamiczny, ale bardziej przejrzysty.
- Dźwięk został nieco poprawiony.
Wersja oprogramowania 1.1.7 .
- Odpowiedzi docelowe mieszczące się pod maską są rysowane na górze maski.
Wersja oprogramowania 1.1.6 .
- Skala VDI uległa spowolnieniu.
- Echa po przeciążeniu są w dużym stopniu tłumione.
- Naprawiono błąd pomiaru niewyważenia czujnika.
Wersja oprogramowania 1.1.5.
- Wymieniono filtry wejściowe.
- Czułość została nieznacznie zwiększona.
- Pozostały 3 poziomy wzmocnienia (GAIN).
- Poprawiono sygnał przeciążenia.
Wersja 1.1.4 .
- Maksymalna częstotliwość dźwięku została wreszcie naprawdę zmniejszona.
- Echo stłumione.
- Wprowadzono sygnał przeciążenia wejścia (~100 Hz).
Wersja 1.1.3 .
- Filtr NORMALNY staje się filtrem domyślnym.
- Zidentyfikowane błędy zostały poprawione.
Wersja 1.1.2 .
- Usunięty filtr nr 1. Przy pierwszym włączeniu filtr jest ustawiony na TWARDY, w razie potrzeby przełącz na NORMALNY.
- Zmniejszona maksymalna częstotliwość dźwięku dla lepszych wrażeń słuchowych.
- Czas reakcji na naciśnięcie przycisków został nieznacznie skrócony.
- Naprawiono szereg mniejszych błędów.
Wersja 1.1.1 .
- Poprawiono błąd pojawiający się przy przełączaniu wzmocnienia.
Wersja 1.1.0 .
- Zmieniono zasadę dźwięczności docelowej (długa odpowiedź została zastąpiona krótką).
- Pozycja menu „Opóźnienie dźwięku” została usunięta jako niepotrzebna.
- Wskaźnik poziomu odpowiedzi jest statyczny.
- Zapamiętywany jest kąt reakcji podłoża.
- Podświetlenie jest teraz włączone także podczas regulacji „Głośności” i „Bariery”.
- Naprawiono drobne błędy.
Wersja 1.0.8 .
- Dodano przełączanie częstotliwości odcięcia filtra masy. Teraz:
Filtr 1: Filtr do lekkich zabrudzeń.
Filtr 2: Zwykły filtr środkowy, który był w poprzednich wersjach oprogramowania.
Filtr 3: Filtr do ciężkich zabrudzeń.
Wersja 1.0.7 .
- Do istniejącego schematu lektora dodano dwa kolejne. Teraz:
Schemat 1: Częstotliwość zmienia się płynnie w całym zakresie w zależności od celu VDI.
Schemat 2: Częstotliwość zmienia się płynnie w zależności od VDI od 0 (90) do 41 (131) stopni. Cele poniżej 0 brzmią niskim tonem, powyżej 41 - wysokim tonem.
Schemat 3: Cele poniżej 0 (90) brzmią niskim tonem, powyżej 0 (90) - wysokim tonem.
ustawienia bezpieczników dla PonyProg:
ustawienia bezpieczników dla SinaProg:
Zastosowano czujnik DD o parametrach: średnica zewnętrzna 230 mm, TX – 40-45 zwojów drutu 0,5 mm, RX – 200 zwojów drutu 0,2 mm. Obwód TX połączony jest według obwodu z rezonansem szeregowym, przybliżona pojemność wynosi 0,3 uF, w prototypie był dostrojony do częstotliwości 8,192 kHz, ogólnie urządzenie może pracować w częstotliwości 4,5 - 9 kHz. Obwód RX jest podłączony zgodnie z równoległym obwodem rezonansowym i jest dostrojony do częstotliwości 1,5–2 kHz poniżej częstotliwości rezonansowej TX.


